


2月15日,“潜龙二号”深海机器人正在接受最后调试,准备下水。

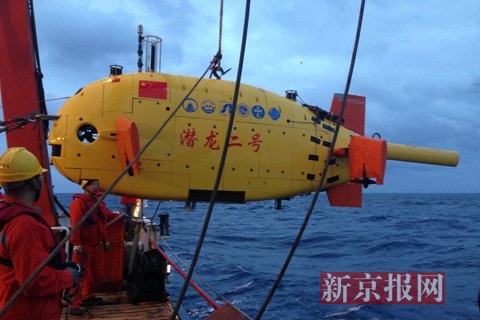
2月15日,作业组多人从各个方向拉起“潜龙二号”,准备入水。

作业组正在拉绳维持潜器平衡。本组图片摄影:新京报记者金煜
新京报快讯(特派记者 金煜)当地时间2月15日晚,西南印度洋,科考船“向阳红10号”携带的吊架挂钩成功钩住了鲜黄、鱼形的深海潜水器“潜龙二号”,并将之缓缓送上后甲板。藉此,我国首台自主研发的面向神秘的大洋热液区探测的4500米级自主水下机器人的首次试验性应用任务成功完成,意味着其已开始为我国勘探西南印度洋海底资源,调查极为复杂的海底地形地貌做出贡献。
茫茫印度洋,首次开始应用
当地时间2月15日下午2点,科考船“向阳红10号”紧邻后甲板的监控室内,几名值班的年轻的科研人员一边盯着数据实时滚动的屏幕,一边开起了打赌的玩笑:在深海潜水器“潜龙二号”何时浮出水面这个问题上,有人猜是2点,有人猜是4点,作为潜水器的总设计师,刘健也参与了打赌,他猜了3点。
刘健来自中科院沈阳自动化研究所,操着一口标准的东北腔,“都瞎猜的,我们谁也不知道它什么时候会上来。” 正是因为这是一台全自治的水下机器人,“潜龙二号”十分智能,母船并不需要给它实时指令,它自己就可以决定什么时候结束任务,浮出水面。 对于正在西南印度洋执行第40航次第二航段任务的我国第一艘官方和民营资本合作的新型科考船“向阳红10号”来说,其上负载的“潜龙二号”是这次科考任务中最大的亮点。该航段首席科学家倪建宇介绍,潜水器项目是该航段中最主要,最优先的科研任务。
作为“十二五”国家863计划深海潜水器装备与技术重大项目的课题之一,“潜龙二号”此前已分别在我国南海和西南印度洋进行了海上试验。
今年1月10日,也就是“向阳红10号”上一个航段中,该深海机器人首次成功下潜至1600米指定位置,获得了设定区域的精细海底地形地貌图,实现了它在洋中脊海底的首次勘探,第一航段的试验结束后,多位随船现场验收试验专家对其各方面性能进行了严格的打分,并最终通过了验收。
从南海试验以来,潜龙二号一共执行了24次下水任务。在西南印度洋进行了8次,虽然和国外那些研发已久的水下机器人下水的次数比起来这还少得多,但运行顺利,已完成试验阶段规定的全部内容。而现在,“潜龙二号”进入了试验性应用阶段,虽然还不完美,但它已开始参与到勘探西南印度洋海底资源的实际工作中。
“黄色小鱼”设计感极强
2月14日,1.5吨重的“潜龙二号”摆在后甲板,开始最后的调试,准备下水进行一天多的勘测。母船进入作业区后遭遇多日恶劣天气,而这一天海况终于有所起色,船长判断,第二天的海况会更好,有利于回收。
科考船上满是重型设备,实验器材,进入作业区的后甲板须穿工作服,戴安全帽,而这台深海机器人强大的“设计感”则为这种沉重的作业环境带来一丝可人的气息。没有人会否认,“潜龙二号”看起来像是一条嫩黄色的热带鱼,此前,还有人把它形容成动画片角色“尼莫”。
刘健也不否认这点,但对所有关于他是否从鱼身上得到启发的疑问,他都会解释,自己设计初衷并非为仿生,而是为了满足热液区探测的需求而设计,最终,“大自然、生物界进化的结果,跟我们科技研究逐渐优化的结果,两者最后殊途同归。” 刘健介绍,通常的潜器设计为回转体,横向和纵向的阻力比较平衡,但对于热液区这样具有非常复杂地形的地方,潜器需要不断垂直进行调整,“可以说是翻山越岭,爬山下山”,为此,他们将“潜龙二号”设计成现在的“立扁型”,大大增强了潜器垂直面的灵活性和机动能力。而且,立扁型的设计,使之具有很高的抗风浪能力,即使在浪大的海面上,也可以如不倒翁一样保持不被翻身。
除此之外,它在海面上还具有一定的航行能力,可以通过母船的遥控器进行简单的操控。这个还处于“幼年期”的水下机器人已经进入3000多米深的西南印度洋热液区海底,去探测复杂多变的海底。它身上携带可以测量盐度、温度、深度、浊度、甲烷、侧扫声纳、磁力仪、照相机等多个传感器,最终将在近海底采集各类信息,以期最终绘制出海底的地形地貌图来。

“潜龙二号”入水前。

正在入水的“潜龙二号”。

“潜龙二号”总设计师刘健紧张地盯着作业组调试潜水器准备下水。本组图片摄影:新京报记者金煜
机器人也会 “长大”
20多个作业人员从各个方向拉着牵绳,在四面平衡中,A型架缓缓地将“潜龙二号”放入船尾的水中,一眨眼间,这条黄色的“鱼”就消失在了水里,只剩扑打出白沫的浪涌。
“接下来就看它的了,‘孩子’要有出息,晚点回来我们也高兴。” 潜水器入水后,刘健望着海浪说,他挺喜欢把它叫做“孩子”。 在他看来,“潜龙二号”下水作业的这段时间,母船上的科研人员除了值班之外,反而可以休息一下,因为对于这台进入工作状态的智能水下机器人来说,人其实也做不了什么。因为带宽有限,工作状态中的潜器只向母船发来如高度、深度、位置等简单的信息,大量的声学影像等探测信息都被储存起来,等到其回到母船,人才会有海量的数据分析要做。
刘健说,设计这台全自治水下机器人,初衷就是要让人的指令干预越少越好。科研人员事先对机器人编写使命任务,如此次的勘探目标是西南印度洋一块约30多平方公里的热液区的海底,其被“切割”成数条横线线路,机器人将沿着线路在海底来回横扫,其上携带的各种传感器采集各类信息。
根据事先输入的指令,有三种情况会使得机器人终止任务,浮上水面。一是电力耗尽,二是任务完成,三是出现重大故障。除此之外,编程者也设计了一条30个小时的最大工作时限以确保机器人的安全,对于14日的这次下潜任务,这个最大安全时限意味着其必须在2月15日下午5时之前开始上浮。
“潜器研发五年,孩子带五年也该长大了。”刘健常常觉得对潜器的研制如同培育孩子成长,而每次潜器下海,他的心中也既紧张,又充满期待,“就像期待自己的孩子一样,希望它能长大,能独立。”
2月18日,湿漉漉的潜器被回收到母船。新京报记者 金煜 摄
首次坚持走完全航程
2月15日下午4点45分,监控屏幕上,潜水器发来的高度数据开始变小,在连续30个小时正常工作后,它发来了“97”的代码,这意味着已达到最大工作时限,“潜龙二号”自动终止任务,开始上浮。
此前的西南印度洋验收试验中,出于考察各种性能的目的,这台深海机器人每次下水只进行不到10个小时左右的任务,而坚持了整整30个小时的全航程探测,这是它在热液区的第一次。
然后,只有被安全回收,任务才能算是成功的,而回收也是整个过程中关键环节。一个小时后,潜水器在距离母船上千米外浮出水面,母船调向朝之径直开去。靠近时,从其左侧缓缓驶过,并尽可能靠近。潜水器在船的一侧越来越靠近,它黄色的机身随着海浪上下起伏,上方的感应器闪烁着红灯,头顶不时有海鸟盘旋。
作业组20余人早已等在甲板一侧,他们尝试用抛绳、撑杆等试图勾上潜水器,然而,此时,风力突然加大,海浪开始翻滚,潜水器被海浪推得忽远忽近,很难用普通的甩绳钩勾住。这是一个需要技巧的工作,不仅要拦截住潜水器,而且还得防止它过于靠近母船造成撞击。 最终经过努力,作业组终于用绳子套住了潜水器吊钩。这个满载着各种数据的湿漉漉的“机器鱼”被小心翼翼地拖了上来。
此时夜幕已落,科学家和工程师们很快对“潜龙二号”进行全身检查。“鱼肚子”被打开,连上一根长长的网线,开始下载数据, “鱼背”也即将被打开,以便更换电池。 “休息”了一天后,17日,“潜龙二号”再次下水,继续探寻另一块新的未知海底世界。
“目前看,这个潜次是成功的。” 航段首席科学家倪建宇说。刘健也表示,潜水器下到了数千米以下地形极为复杂的海底,第一次持续工作到30个小时的最大时限,回收也基本顺利,潜水器在执行探测任务时能够按规划路径航行,而至截稿前的初步数据分析情况看,探测数据都被导出且基本有效,这意味着“潜龙二号”的首次试验性应用任务成功了。
“大洋渺茫,都是未知数,每次孩子下去探测的都是未知世界,每次都是新的考验,但每次下潜,我们都可以提供更多的宝贵数据供科学家做分析,丰富我国的海洋智库,寻找人类所需的宝藏,同时也为进一步探测提供依据。”刘健说。





