

摘要
本文面向实验流体力学、空气动力学及多相流研究中全场、瞬态速度测量需求,系统阐述粒子图像测速(Particle Image Velocimetry,PIV)系统的选型逻辑与实施路径。以“主导矛盾”为主线,将PIV系统划分为高频时间主导型、高分辨率空间主导型、时空均衡型及多物理场耦合主导型四类典型架构,并梳理科研、生物医学及工业领域典型应用场景配置建议,旨在为科研与工程技术人员提供兼具学术严谨性与工程实用性的PIV系统选型参考,推动全场速度测量技术在更广泛领域的高效应用。
一、引言:从可视化流动到定量流场重构
实验流体力学的核心任务,是重构瞬态流场结构并揭示其动力学机制。传统点式测量技术如热线风速仪、激光多普勒测速仪(LDV)虽能提供高时间分辨率的单点数据,但在面对湍流相干结构演化、涡结构生成与耗散、多相界面动力学等具有强空间非均匀性的流动问题时,面临着严重的信息缺失,难以完整刻画流场的瞬时全域拓扑结构。
粒子图像测速(PIV)技术的本质,是通过对示踪粒子在已知时间间隔内的位移进行统计相关计算,实现从二维图像序列到瞬态速度矢量场的重建,从而将流动测量从点信息提升至场信息。在这一过程中,PIV系统不仅是成像设备与光源的组合,而是一个由光学照明体系、时间同步机制、成像链路与流场重建算法共同构成的统一测量体系。
因此,决定PIV系统效能的,不是单一激光能量或相机性能参数,而是PIV系统能否在特定流动速度、空间尺度、示踪条件及光学环境下,稳定重构出具有统计显著性的流场信息。
二、PIV系统选型底层逻辑:时空采样与物理约束统一
PIV系统选型的核心矛盾,源于流动过程的多尺度性与测量系统离散采样之间的匹配关系。在不同流动问题中,时间尺度、空间尺度以及环境干扰条件构成系统设计的主导约束,这是系统选型的根本出发点。
●时间尺度主导:在高速喷射流、冲击流,流动结构在毫秒至微秒尺度内发生剧烈变化,此时PIV系统必须具备足够高的时间分辨能力,避免粒子图像在相邻帧之间发生不可追踪的跨窗位移,从而导致互相关算法失效。这类问题本质上要求系统满足严格的时间采样定理约束,关键在于双帧时间间隔的极限压缩能力以及同步触发精度。
●空间尺度主导:在微流控、生物微通道流动或裂隙渗流等问题中,流动结构的尺度毫米至微米量级,此时测量精度主要受限于光学成像系统的分辨能力与粒子统计可分辨性。PIV系统在此类问题中的核心约束是空间信息的保真度,如光学畸变控制、景深优化及高放大倍率下的标定精度。
●时空均衡主导:流动同时涉及中等时间尺度与空间尺度时,如风洞流场、涡激振动,系统须同时满足涡结构解析所需的空间分辨能力与非定常结构捕捉所需的时间分辨能力,选型本质是在空间信息保真与时间动态捕捉之间进行耦合优化。需综合考量相机的满幅帧率、分辨率及激光器的频率与能量。
●环境主导:在高温燃烧、多相反应流以及强折射率梯度环境中,测量误差往往不再由采样频率或空间分辨率主导,而是由介质本身引入的光学扰动所控制。这类环境主导型问题要求系统在极端噪声背景下仍能保持离子图像统计可分辨性,因此系统设计重点转向光学滤波能力、信噪比控制能力以及抗扰动同步稳定性。
三、科研领域典型应用场景PIV系统推荐
1.经典圆柱绕流(水流场)-时空均衡型
流动结构主要表现为剪切层发展与周期性涡脱落,其核心物理特征集中于中低雷诺数条件下的非定常涡街结构演化。该类问题的关键在于稳定捕捉涡脱落频率及空间结构,而非极端时间分辨率或超高空间细节。
因此PIV系统推荐2D2CPIV即可,采用低频双脉冲激光器(10~15Hz,能量100~200mJ)配合千万级像素跨帧相机。重点优化片光源厚度以照亮测量截面,并采用多重网格迭代互相关算法获取高动态范围的速度矢量场,后处理中常结合本征正交分解(POD)提取主导模态。
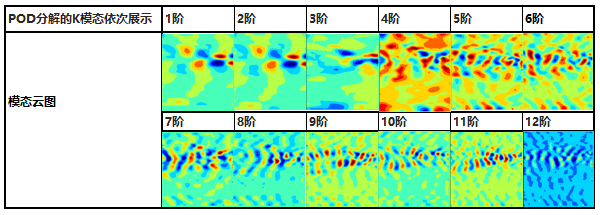
图利用千眼狼(Revealer)PIV软件RFlow4进行圆柱绕流POD模态分析
2.两相流场(气液/液固)-环境主导型
流动结构由连续相与分散相共同构成,界面动力学成为主导因素。由于各相间动量交换具有非线性特征,局部流场存在显著的空间非均匀性,系统需具备三维流场重建能力,避免二维投影带来的结构信息损失。
因此,推荐2D3C PIV(立体PIV)或3D3C PIV(层析PIV),系统需具备高动态范围(HDR)成像能力,并结合基于深度学习的背景分割算法以有效分离离散相与连续相。激光器需具备短脉宽以冻结相界面运动,示踪粒子应选择与分散相折射率匹配的表面处理粒子。
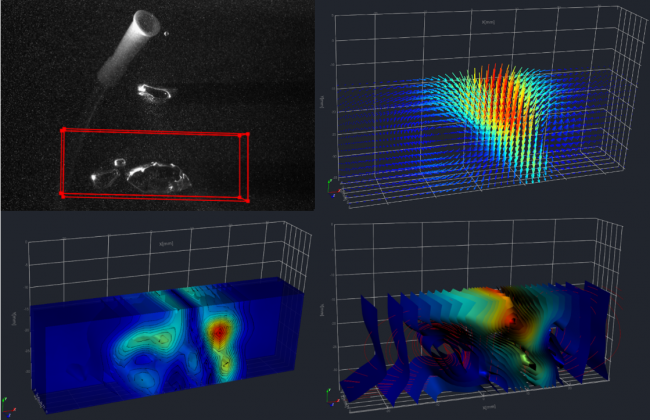
图使用千眼狼(Revealer)Tomo-PIV系统(搭载4台X150高速摄像机)研究Q准则下气液两相流场的三维流场、速度等值面和涡旋结构
3.涡激振动(流固耦合)-时空均衡型+多系统协同
涡激振动研究中,流场驱动结构振动,同时结构响应反过来改变局部流动结构。该类问题核心在于捕捉流场与结构响应之间的相位关系,因此PIV系统往往需要与结构测量系统同步工作,通过统一时间基准实现流固耦合关系重建,关键并非单独的流场精度,而是多物理场时间同步一致性。推荐采用2D3CPIV获取三维速度场,并与3DDIC系统通过同步控制器实现纳秒级时序对齐,以精确重建每一时刻的“流场力-结构位移”对应关系。
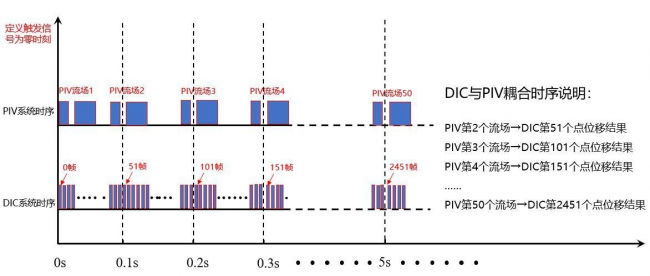
图千眼狼(Revealer)3DDIC系统与3D3C PIV系统耦合时序说明图
4.机翼风洞流场(气流场)-时间主导型
机翼风洞流场研究主要关注边界层发展、流动分离以及涡结构生成机制,结构演化具有明显非定常性,气体流速可达亚/跨音速,流动结构变化迅速,推荐高频2D2C/2D3CPIV系统,搭配高频脉冲激光器与百万级像素、万帧每秒(fps)以上的高速跨帧相机。极短的跨帧时间(<1μs)是冻结高速粒子位移的关键。同步控制器的精度亦需达到纳秒级以精确控制激光脉冲与相机曝光时序。
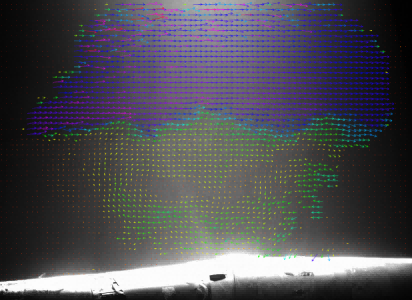
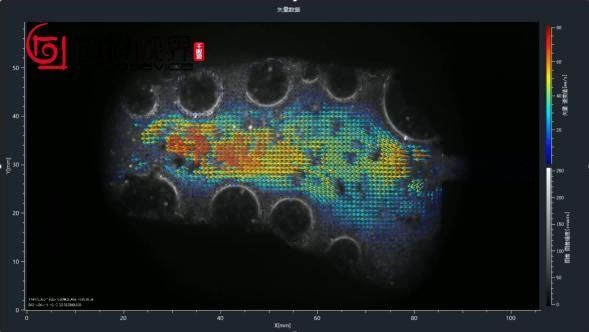
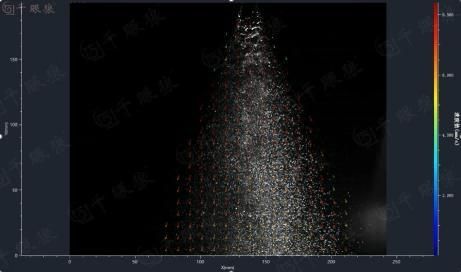
图利用千眼狼(Revealer)高频PIV(搭载X150高速摄像机)测量的风洞内锥形结构上方流场分布信息
5.燃烧火焰流场(火焰场)-多物理场耦合主导型
在燃烧火焰流场研究中,流动与化学反应高度耦合,温度梯度与浓度同时存在,并对光学传播产生显著扰动。研究需同时获取火焰流场速度与关键自由基OH,CH的浓度分布,解析湍流-化学反应的相互作用。该场景通常采用PIV-PLIF耦合测量系统,包含两套独立的激光与成像链路,PIV链路用于测速,PLIF链路采用可调谐染料激光器激发目标组分荧光。核心难点在于空间重合与时序同步,需使用精密的光束合束系统确保两片光共面,并通过多通道同步控制器实现PIV高速摄像机、PLIF高速摄像机、像增强器、激光器的同步纳秒级触发。
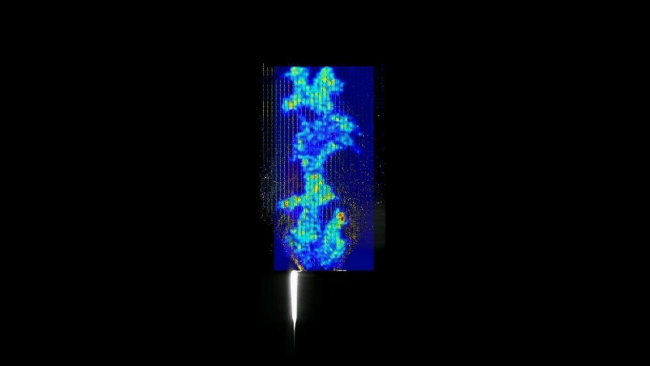
图利用千眼狼(Revealer)高频PIV-PLIF同步耦合测量系统(搭载2台S1310高速摄像机)实现火焰流动结构与化学反应区同一时刻、同一平面上的同步成像
6.裂隙渗流流场(多孔介质)-空间主导型
裂隙渗流问题中,流动发生于复杂多孔介质内部,尺度极小且结构高度非均匀,属于微尺度空间流动测量问题,需量化微米至毫米级裂隙内的速度分布、优先流路径及滞留区特性。推荐Micro-PIV系统,采用千眼狼(Revealer)高分辨率高速摄像机,搭配高倍显微成像系统、激光器、同轴光路,实现微尺度清晰捕捉,使用RFlow4 PIV软件实现矢量计算、速度场分析、流线与涡量提取,完成从图像到数据的闭环。
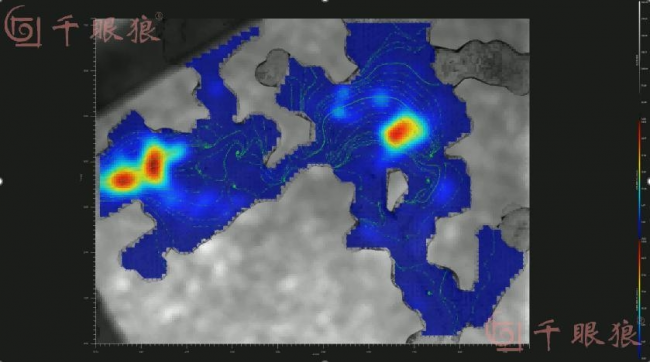
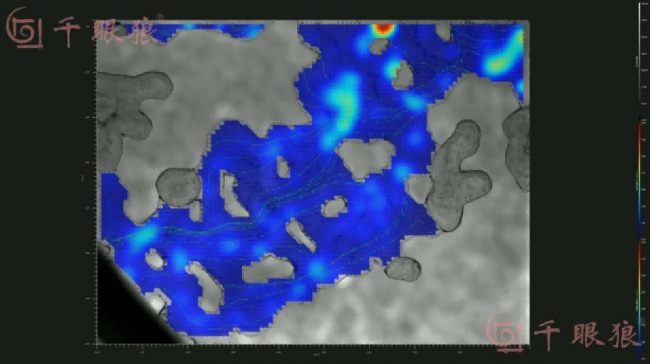
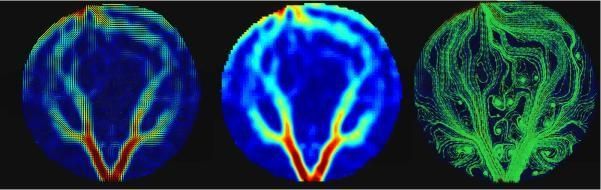
图利用千眼狼(Revealer)高频PIV(搭载X150高速摄像机)测量的浸前浸后裂隙通道内流场特征
四、生物医学领域典型应用场景PIV系统推荐逻辑
1.心脏瓣膜流场-高速时间主导型
心脏瓣膜流场研究中,血流与柔性结构之间存在显著的流固耦合效应,局部剪切应力分布直接影响瓣膜功能与血栓形成风险,该类问题的关键在于捕捉周期性非定常流动结构,因为PIV系统需具备稳定的时间分辨能力,捕捉毫秒级的瓣膜快速启闭过程与伴随的复杂射流。
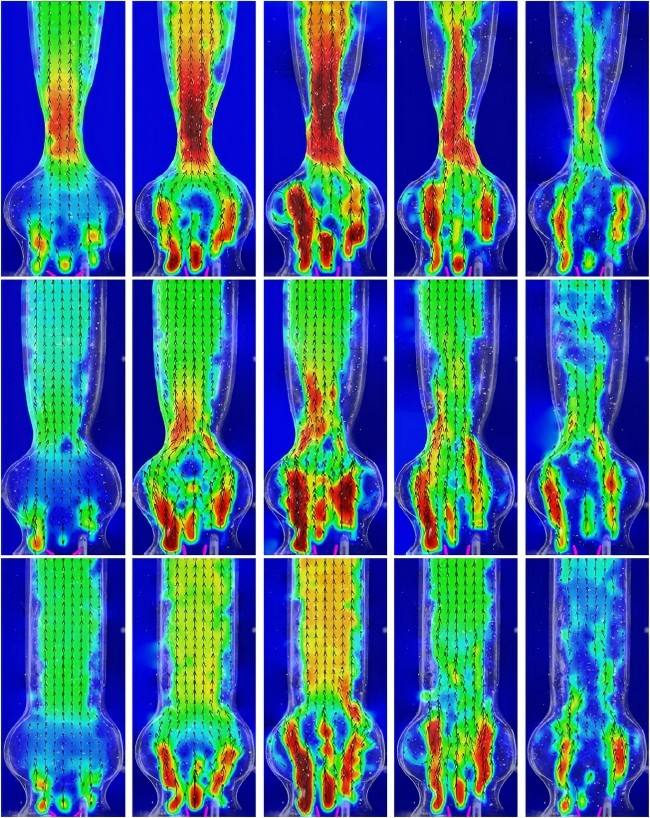
图利用千眼狼(Revealer)高频PIV系统(搭载X150高速摄像机)测量的高动脉压、正常动脉压与低动脉压的主动脉瓣下游速度分布云图
2.微流控流场-空间/环境主导型
微流控流场研究关注微通道内的流体混合、液滴生成、细胞操控及粒子聚集行为。流动尺度处于微米级别,雷诺数极低,流动呈现层流特征,此条件下,系统性能完全受限于空间分辨能力与光学成像质量,推荐Micro-PIV系统搭载倒置荧光显微镜,采用高量子效率与长工作距离物镜,高精度解析微通道内的速度梯度与扩散行为。
图利用千眼狼(Revealer)Micro-PIV系统(搭载M230高速摄像机)测量的内部流场速度云图
3.液滴振动与破碎-时空均衡型
在液滴振动与破碎问题中,界面演化过程高度瞬态且具有强非线性特征,液滴在外界扰动下经历拉伸、颈缩与断裂多个阶段。该过程对时间分辨率极为敏感,时间分辨率需足以捕捉液滴颈部快速变细直至断裂的完整过程,故推荐高速PIV系统。
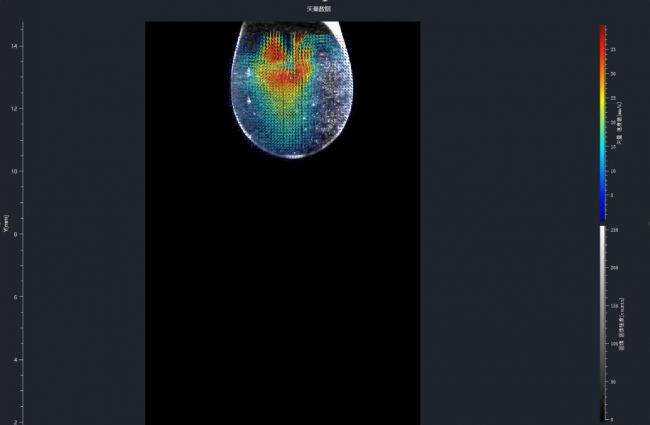
图利用千眼狼(Revealer)高频PIV系统(搭载X150高速摄像机)测量的滴落液滴内部流场速度云图
4.仿生流场-时间主导型
在仿生鱼类流场研究中,研究对象从静态结构流动转向高度机动性的生物推进机制。鱼类在转弯、加速及逃逸等行为中,其尾鳍拍动与身体波动会诱导非定常涡结构,并通过涡脱落与涡吸收机制实现推力调控与姿态控制。PIV系统需能够同步捕捉身体运动边界与周围涡结构演化过程,在较大空间尺度下维持足够时间分辨能力,以解析尾涡结构生成、反卡门涡街转换以及推力矢量偏转等机制。
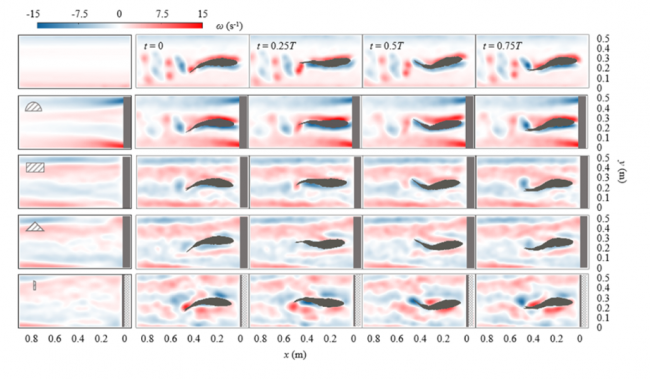
图利用千眼狼(Revealer)高频PIV系统(搭载X150高速摄像机)测量的涡量旋转角速度云图
五、工业领域典型应用场景PIV系统推荐逻辑
1.流体机械/泵-时空均衡型
在流体机械与泵内部流场研究中,流动结构主要由叶轮诱导流、二次流与回流区构成,核心研究目标是分析能量损失机制与效率分布特征。推荐二维或三维PIV方法结合稳态与瞬态测量,以实现对内部复杂流动结构的完整解析。
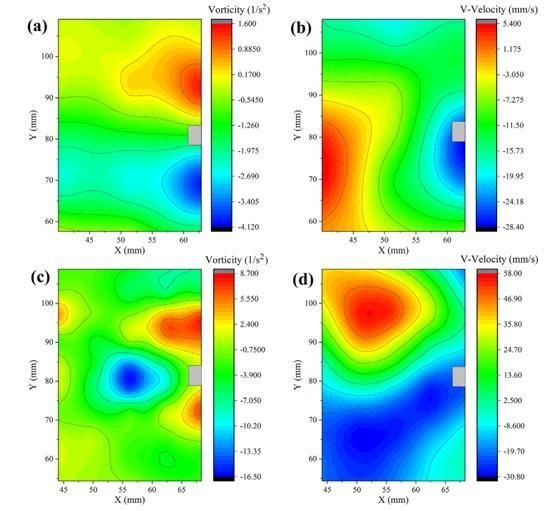
图-利用千眼狼(Revealer)高频PIV系统(搭载5F01高速摄像机)测量的传统叶片(a,b)和刚柔叶片(c,d)的涡度和速度矢量图
2.喷嘴喷雾流场-时间主导型
喷嘴流场研究重点表征喷嘴近场的一次雾化、液核破碎、液滴尺度与速度分布,流动结构高度非均匀且多尺度并存,液滴密集、多重散射严重且速度极高,属时间主导型,推荐高频2D2C-PIV,结合阴影法,采用高能量、短脉宽的双脉冲激光器以冻结高速运动的微小液滴。
图利用千眼狼(Revealer)高频PIV系统(搭载NEO25高速摄像机)测量高速喷淋流场
3.电解水制氢-环境主导型
电解水制氢核心问题是分析电解过程中电极表面气泡的成核、生长、合并与脱离行为,及其对电解效率和浓度极化的影响,属环境主导型。气泡尺寸变化范围大,运动速度快,推荐Micro-PIV与高速可视化结合,实现多尺度流动结构的统一表征。
图利用千眼狼(Revealer)高频PIV系统(搭载S1315高速摄像机)测量电解槽流道中心区域、电极和隔膜表面的流速
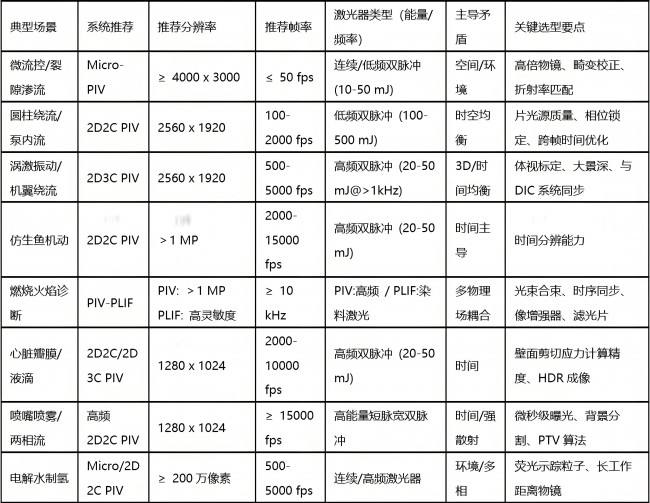
六、PIV系统选型一览表
七、结语:PIV系统专业选型的原则
PIV系统选型的本质,是对特定流动物理问题进行精确的测量建模,基于上述多场景分析,应遵循以下核心原则:
一是主导矛盾优先原则。首先判断实验瓶颈是速度(时间)、尺度(空间)、维度(3D)还是环境(多相),跨声速流动优先保证跨帧时间与帧率,微尺度流动优先保证放大倍数与畸变校正,复杂涡结构或生物机动流场研究应考虑升级至2D3C或3D3C系统。
二是系统协同与光路完整原则。PIV系统选型需通盘考虑激光器、PIV相机、同步控制器、片光源光学组件及示踪粒子特性的匹配性。
三是可扩展性与同步性原则。PIV系统应具备外部触发接口,以便与激波管、DIC系统、像增强器等设备协同工作。在多测头、大视场应用中,系统应支持分布式架构与全局坐标统一。
本文以主导矛盾为主线,梳理了多领域中典型应用场景的需求特征与配置建议,旨在推动全场、瞬态速度测量技术在更广泛的科学研究与工程实践中实现高效、精准的应用。